Returns the spherical linear interpolation of points between two vectors
Usage
slerp(x0, x1, t)
# Default S3 method
slerp(x0, x1, t)
# S3 method for class 'Vec3'
slerp(x0, x1, t)
# S3 method for class 'Line'
slerp(x0, x1, t)
# S3 method for class 'Ray'
slerp(x0, x1, t)
# S3 method for class 'Plane'
slerp(x0, x1, t)
# S3 method for class 'Pair'
slerp(x0, x1, t)Details
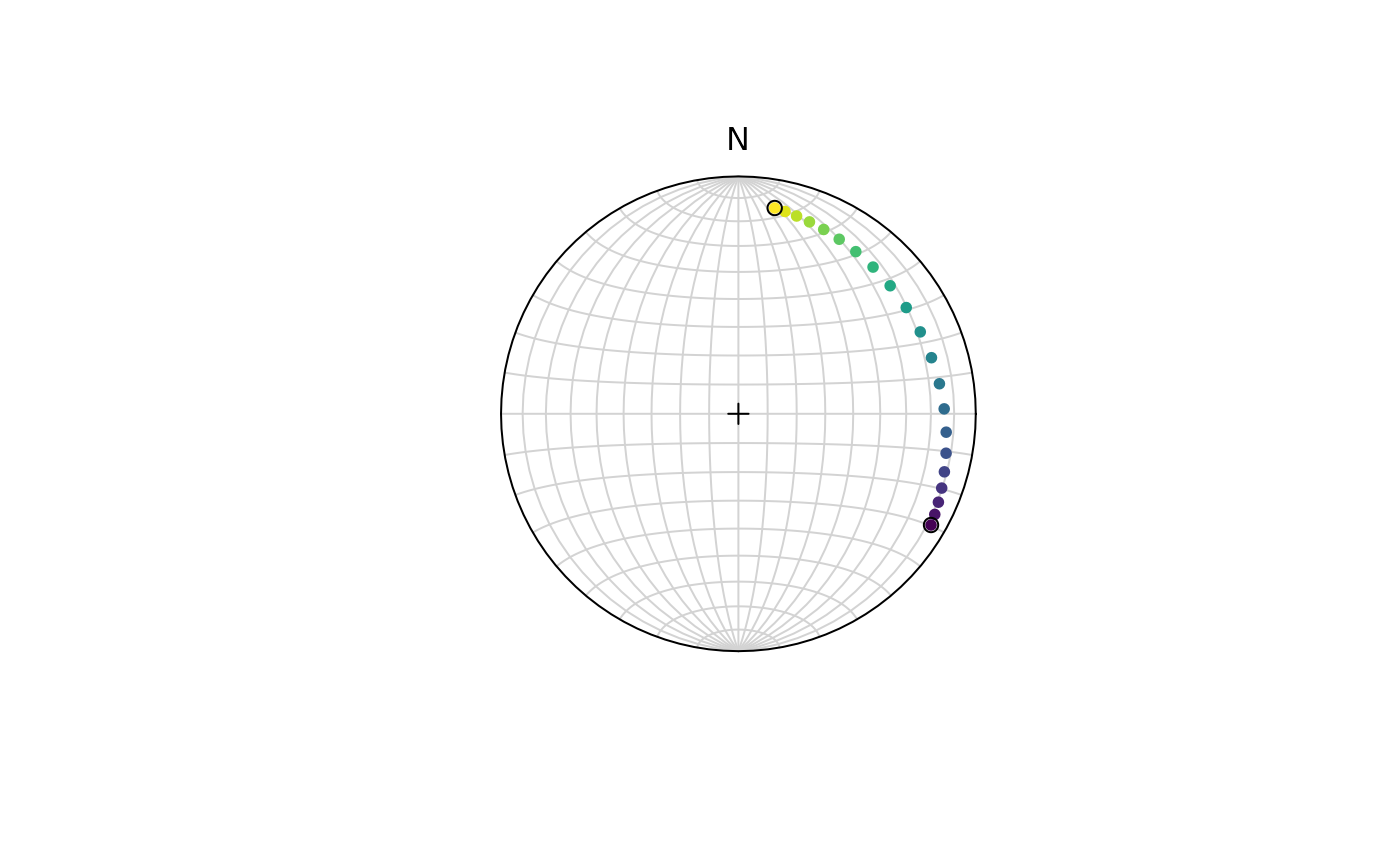
A Slerp path is the spherical geometry equivalent of a path along a line
segment in the plane; a great circle is a spherical geodesic. The Slerp
formula is derived from the spherical law of sines. The formula for Slerp between
two unit vectors x0 and x1 is:
$$\text{Slerp}(x_0, x_1; t) = \frac{sin((1 - t) \theta)}{sin(\theta)} x_0 + \frac{sin(t \theta)}{sin(\theta)} x_1$$
where the angle \(\theta\) is the angle between x0 and x1, and t is
the interpolation factor (ranging from 0 to 1), i.e. the fraction along the
geodesic path between x0 and x1 for which interpolated vector will be calculated.
See also
stereo_segment() for plotting the Slerp path as a line