Decomposition of Orientation Tensor Eigenvectors and Eigenvalues
See also
ortensor(), eigen()
Examples
set.seed(20250411)
mu <- rvmf(n = 1)
x <- rfb(100, mu = mu, k = 1, A = diag(c(10, 0, 0)))
x_eigen <- eigen(x)
x_eigen
#> eigen() decomposition
#> $values
#> [1] 51.803616 43.592517 4.603867
#>
#> $vectors
#> Vector (Vec3) object (n = 3):
#> x y z
#> [1,] 0.7236355 -0.1580164 -0.6718501
#> [2,] 0.6315010 0.5443775 0.5521410
#> [3,] 0.2784927 -0.8238228 0.4937184
#>
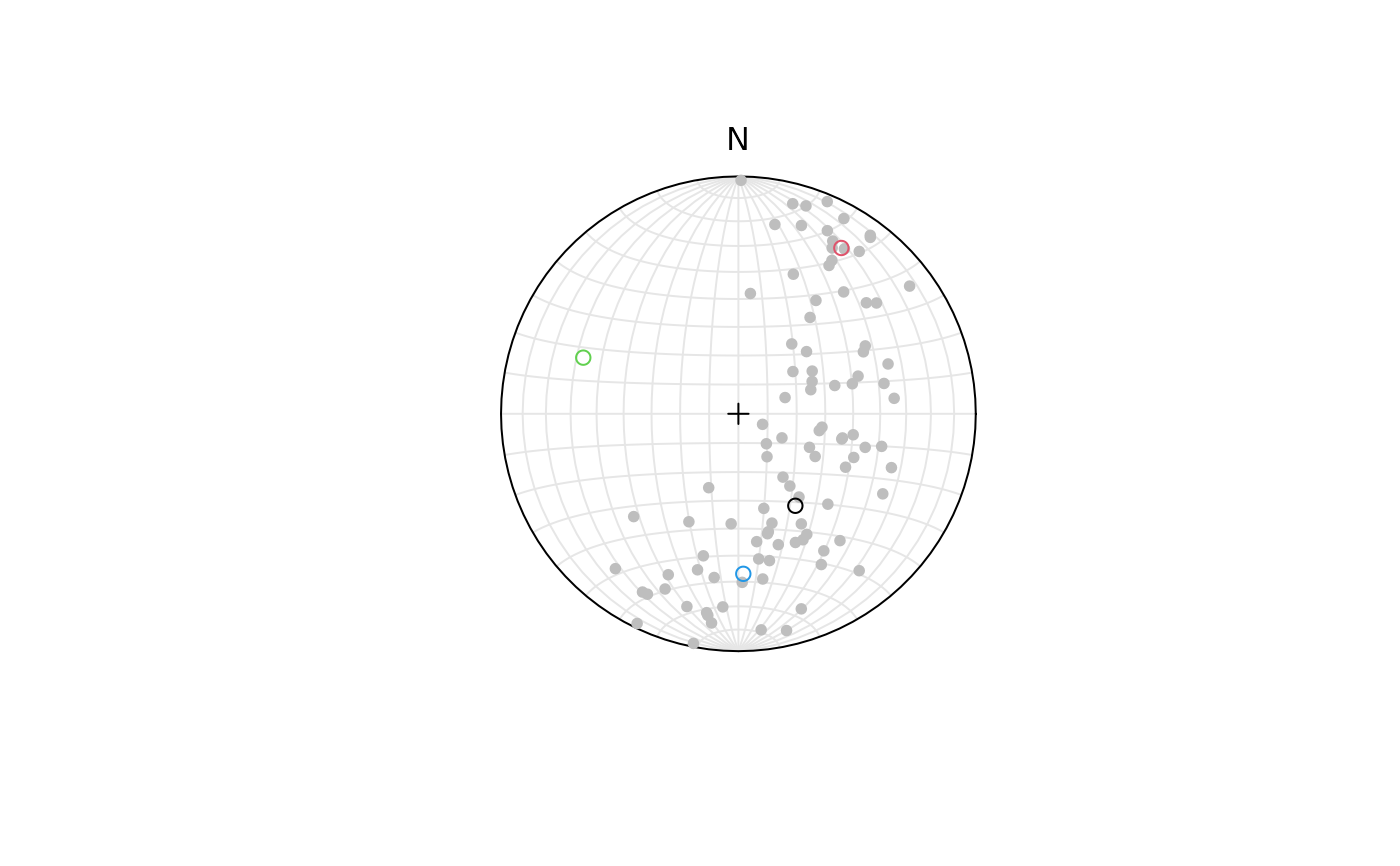
plot(x, col = "grey")
points(mu, labels = "mu", col = 4)
#> Warning: "labels" is not a graphical parameter
points(x_eigen$vectors, col = c(1, 2, 3), labels = c("E1", "E2", "E3"))
#> Warning: "labels" is not a graphical parameter